A look into the GB Smart 16M Flash Cart – Inspecting the Multi-game Menu, Adding Flashing support and a Basic Menu Maker
Posted in Tinkering on May 24th, 2019
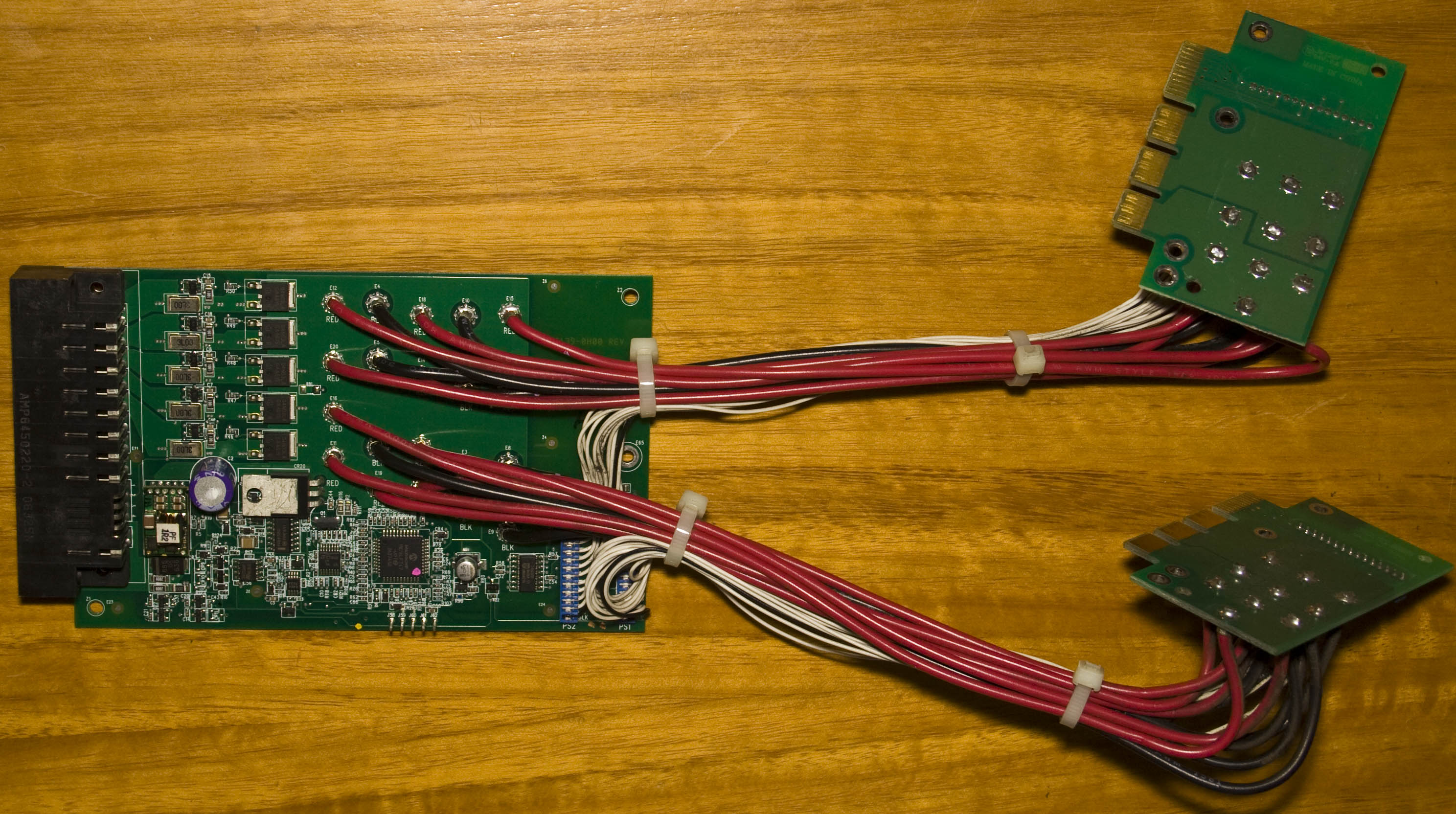
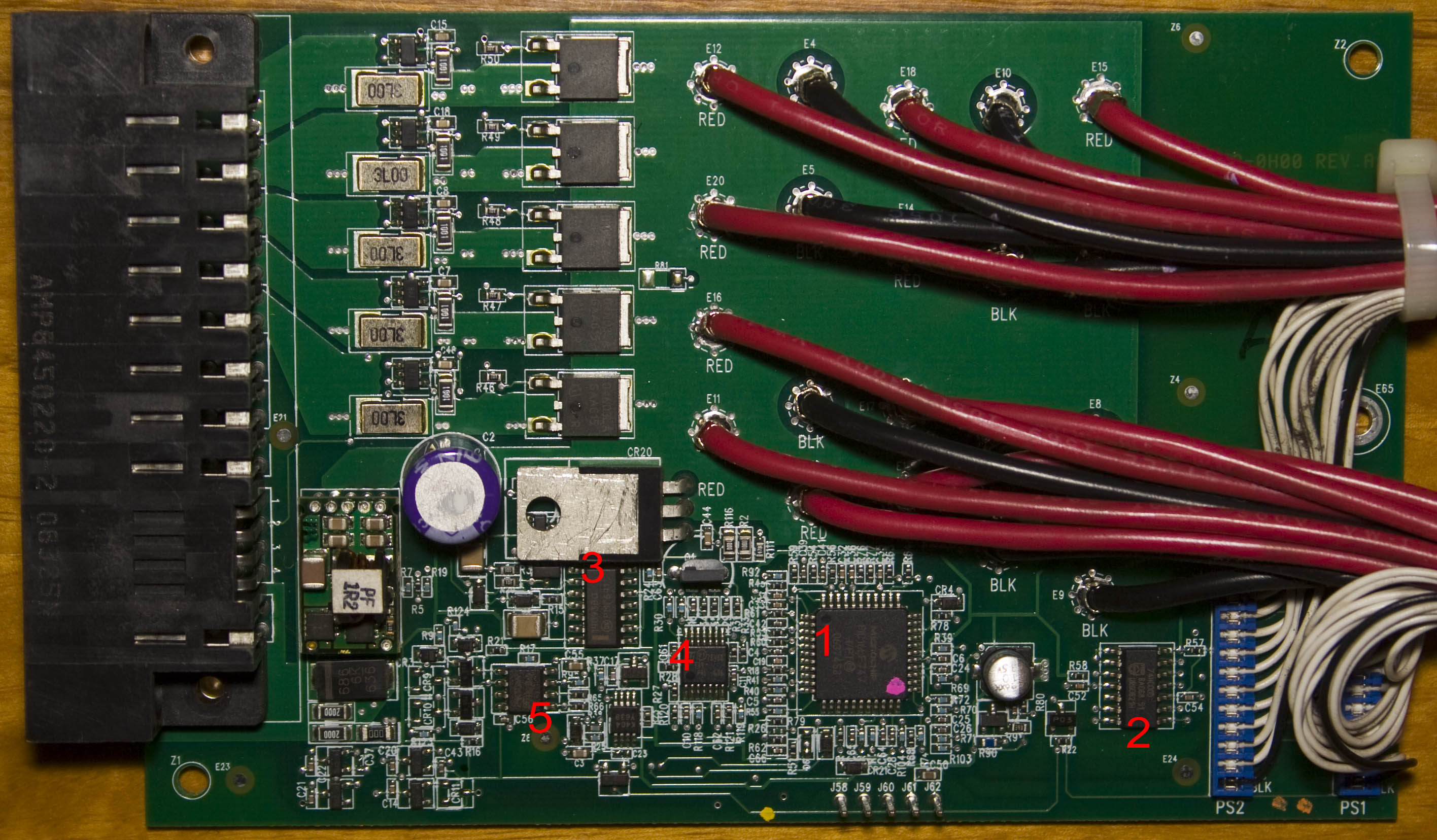
Every now and then I receive an email about adding support for older flash carts but they are usually are hard to find or there isn’t too much information out about them which makes it difficult to add support. I had one user contact me about adding support for the GB Smart 16M flash cart and they were happy to do a swap of my flash cart for theirs. They mentioned it had 4x flash chips which was interesting and were also able to provide me with an empty menu file named GB16M.gb.

A few weeks later it turned up.
Before receiving it, I was thinking how could they fit 4x flash chips on the cart and then I saw they used the low pin count versions, ah makes sense. Perhaps they choose those because they were cheaper than going with a 2MB flash chip. I plugged the cart into my GBA and it loaded up Super Mario Land straight away so it seems to be working. One thing to be careful of is the battery, it is loosely installed and it sort of slid out when I opened the cart. You wouldn’t want to open it up only to lose your saves!
After dumping the cart contents and selecting 2MB as the ROM size, I could see that DK and GB Gallery were also on the cartridge, I’m guessing once we pass the 512KB mark, it switches to the next chip so that means DK started on the 2nd flash chip and GB Gallery started on the 3rd flash chip.